- Applied deep embedded clustering (DEC) with autoencoder pre-processing
- 23.1% overall reduction in mean absolute error
- 26.6% improvement in dense multipath areas
- 49.3% reduction in 95th percentile error
- ✅ Eliminates need for costly labeled training data
Self-Supervised Deep Reinforcement Learning
- Treats CIR as state space, iteratively refines corrections based on trajectory predictability
- Achieves performance comparable to supervised methods without requiring ground truth data
- ✅ Addresses fundamental limitation: supervised approaches overfit to specific environments
Dual-Layer Bayesian Neural Network Fusion Framework (DBNNFF)
- Tackles channel inconsistency errors in phase-difference-of-arrival (PDOA) systems
- Reduces angle errors by 94.7% to just 0.1036° ± 0.0182°
- Outperforms existing algorithms by 25-42.1%
- Even in challenging office and hallway multipath: errors remain <0.17°
🔄 3. Multipath Assistance: Turning Foe into Friend
The most philosophically intriguing approach reframes multipath not as a problem to be eliminated but as a source of additional information. Instead of discarding reflected signals, multipath-assisted localization exploits specular reflections to enhance localizability.
How It Works
- Models likelihoods of both LOS and specular multipath components — “soft multipath information”
- Treats each multipath component as a virtual anchor located at the mirror image of the physical anchor across the reflecting surface
- Enables localization with fewer anchors, maintains accuracy even when LOS paths are blocked
Performance Results
- Cluttered industrial scenarios: 46.4 cm and 33.1 cm 90th percentile errors (3 and 4 anchors)
- Outperforms conventional methods by over 61.8% in challenging conditions
🎛️ Advanced Filtering: The Statistical Battle Against Noise
Beyond raw signal processing, sophisticated filtering techniques play a crucial role in maintaining tracking accuracy over time. The fundamental challenge: TOA measurements in multipath environments exhibit non-Gaussian, impulsive noise characteristics poorly modeled by conventional Gaussian assumptions.
Key Advances
- Alpha-stable distribution modeling: Modified Unscented Kalman Filters (UKF) specifically designed for NLOS and multi-target interference
- Experimental validation: Four DWM1001 UWB sensors tracking two moving targets achieved ~12 cm accuracy
- DS-TWR/DS-TDoA analysis: DS-TWR retains only half the variance previously anticipated; DS-TDoA exhibits roughly five-fold increased variance
- Symmetric response times minimize variance for both protocols
🏭 Real-World Performance: From Theory to Practice
Translating these advances into practical systems requires addressing real-world constraints. The IEEE 802.15.4z standard has enhanced UWB’s capabilities, but achieving consistent centimeter-level accuracy across diverse environments remains challenging.
Adaptive Systems
Adaptive systems that tune localization algorithms based on real-time signal conditions offer a path forward. By selecting appropriate techniques based on Signal-to-Noise Ratio (SNR) and path loss exponent, adaptive positioning systems achieve approximately 10% improvement in moderately NLOS conditions without requiring prior environmental data — setting the stage for truly environment-aware UWB systems.
🚀 Applications and Future Directions
Current Applications
- 🏭 Industry 4.0: Autonomous mobile robots navigating dynamic factory floors with precision
- 📦 Logistics: Real-time asset tracking in warehouses and distribution centers
- 🏥 Healthcare: Patient and equipment tracking within hospitals
- 🥽 Augmented Reality: Spatially aware experiences that understand user position at centimeter scale
- 🚗 Automotive: Passive entry and start systems for smart vehicles
Future Research Directions
- 🧠 Deeper integration of machine learning at the physical layer
- 📡 Joint communication and sensing paradigms — extracting positioning information from routine data exchanges
- 🔧 Self-calibrating systems that adapt to new environments without manual configuration
📌 Conclusion
The multipath challenge that has long constrained UWB indoor positioning is yielding to a multi-pronged assault:
- 🎯 Signal processing advances isolate direct paths with unprecedented reliability
- 🤖 Machine learning — supervised, unsupervised, and self-supervised — learns to correct residual errors without requiring impractical data collection campaigns
- 🔄 Multipath assistance transforms environmental reflections from liabilities into additional positioning references
With modified Kalman filters achieving 12 cm accuracy, neural-aided threshold detection reaching sub-centimeter mean errors, and Bayesian networks cutting angle errors by 95%, the era of reliable centimeter-level indoor tracking has arrived.
The multipath problem hasn’t been eliminated — but it has been solved.
📚 References
- IEEE. (2024). Successive Threshold-Based Multipath Mitigation for UWB Indoor Positioning. IEEE Transactions on Communications.
- Ghent University & Siemens. (2024). Unsupervised Deep Learning for UWB TDoA Localization in Multipath Environments. IEEE International Conference.
- Nature Scientific Reports. (2025). Dual-Layer Bayesian Neural Network for UWB Angle-of-Arrival Estimation.
- arXiv. (2024). Self-Supervised Deep Reinforcement Learning for UWB Error Correction.
- IEEE. (2024). Multipath-Assisted UWB Localization: Turning Reflections into Virtual Anchors.
- ACM. (2024). Alpha-Stable Distribution Modeling for UWB Kalman Filtering in NLOS Conditions.
Ultra-Wideband (UWB) technology has emerged as the gold standard for indoor positioning, offering the potential for centimeter-level accuracy that far exceeds Wi-Fi, Bluetooth, or RFID-based alternatives. By transmitting nanosecond-scale pulses across a wide frequency spectrum, UWB systems achieve exceptional time resolution, enabling precise Time of Flight (ToF) measurements that translate directly into distance estimates. This capability has unlocked transformative applications: autonomous mobile robots navigating warehouses, asset tracking in smart logistics, passive entry systems for vehicles, and augmented reality experiences that seamlessly blend digital and physical worlds.
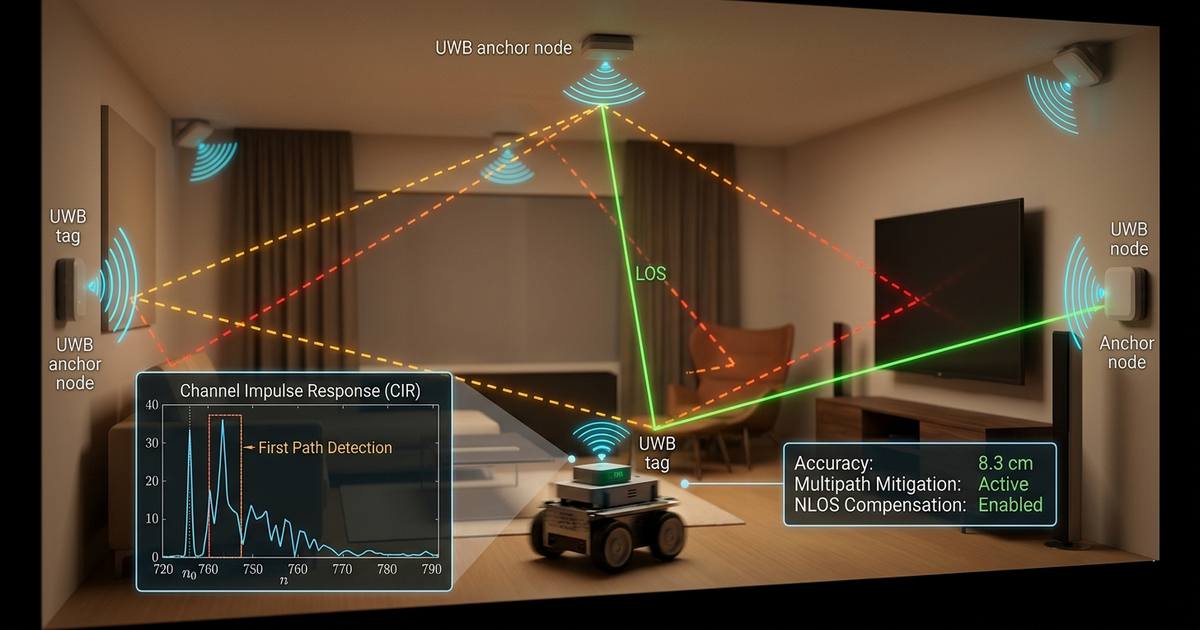
Yet the indoor environment presents a formidable adversary. Walls, furniture, machinery, and even human bodies create a labyrinth of signal reflections. The direct Line-of-Sight (LOS) path becomes corrupted or entirely blocked, while reflected signals—multipath components—arrive at the receiver with delayed timing, creating ambiguity in Time of Arrival (TOA) estimation. In Non-Line-of-Sight (NLOS) conditions, where the direct path is completely obstructed, only indirect paths remain, systematically biasing range measurements and degrading localization accuracy. This is the multipath problem, and solving it is the key to unlocking reliable centimeter-level indoor tracking.
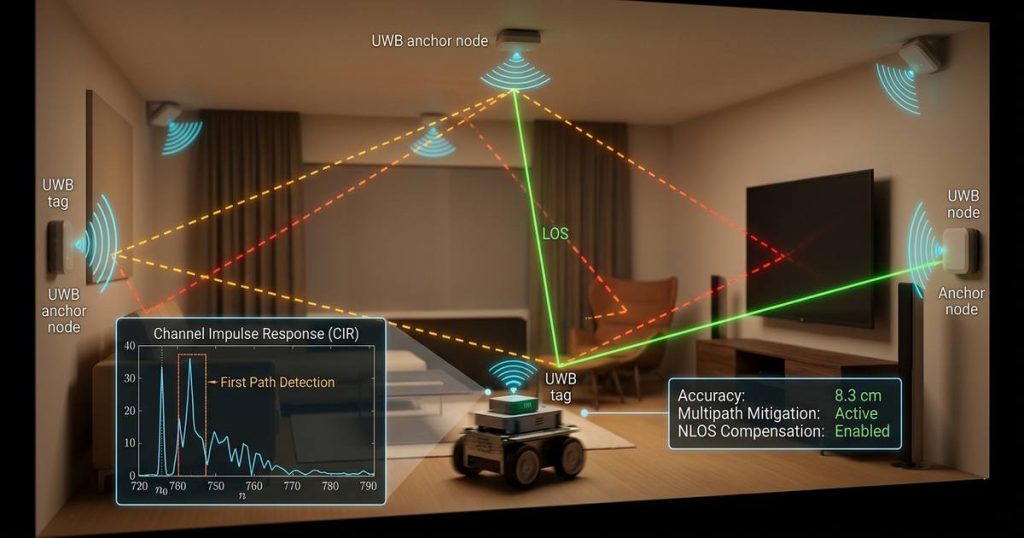
📡 Understanding the Multipath Challenge
The physics of UWB signal propagation in indoor environments creates complex error patterns. When a UWB pulse travels from transmitter to receiver, it follows multiple paths: the direct LOS path (if available) plus reflections from ceilings, floors, walls, and objects. Each reflected path arrives later than the direct signal, carrying different energy levels and phase characteristics.
⚠️ Key Challenges
- First path ambiguity: Traditional TOA-based localization attempts to identify the first arriving path — presumed to be the direct path. However, in dense multipath environments, the first detectable path may not be the true direct path.
- Leading edge distortion: The superposition of multiple closely spaced multipath components can distort the leading edge of the received signal, creating systematic errors in peak detection.
- NLOS bias: When the direct path is blocked, only reflected signals are available, causing the estimated TOA to correspond to a longer path than the true geometric distance — introducing positive bias that can reach meters in severely cluttered environments.
- Non-Gaussian noise: The statistical distribution of multipath errors is non-Gaussian and impulsive, defying the assumptions of conventional Kalman filtering approaches.
📊 Taxonomy of Multipath Mitigation Strategies
Recent advances in UWB signal processing have produced three distinct philosophical approaches to the multipath problem, each with unique strengths and trade-offs.
🎯 1. Multipath Separation: Identifying the Truth
The first approach attempts to isolate the direct path from multipath components through sophisticated signal processing. By analyzing the Channel Impulse Response (CIR) — a detailed profile of signal energy versus arrival time — algorithms can identify the earliest arriving path even when it is not the strongest.
Successive Threshold-Based Multipath (STM)
STM applies adaptive threshold detection to the CIR, successively identifying valid path candidates while rejecting noise-induced false detections. When augmented with STMnet — a neural network that estimates remaining ranging error — the system achieves remarkable accuracy:
- 📏 Mean errors: -0.07 cm in LOS environments, 0.06 cm in LOS office multipath
- 📊 95th percentile errors: 39 cm in challenging residential multipath
- 💾 Computational cost: 330 KB memory, 232,000 FLOPs per inference
📈 2. Multipath Compensation: Learning the Errors
Rather than isolating the direct path, compensation approaches accept that multipath introduces errors and attempt to model and correct them post-hoc. Machine learning has proven exceptionally effective here, learning complex nonlinear mappings from CIR features to range corrections.
Unsupervised Learning (Ghent University & Siemens)
- Applied deep embedded clustering (DEC) with autoencoder pre-processing
- 23.1% overall reduction in mean absolute error
- 26.6% improvement in dense multipath areas
- 49.3% reduction in 95th percentile error
- ✅ Eliminates need for costly labeled training data
Self-Supervised Deep Reinforcement Learning
- Treats CIR as state space, iteratively refines corrections based on trajectory predictability
- Achieves performance comparable to supervised methods without requiring ground truth data
- ✅ Addresses fundamental limitation: supervised approaches overfit to specific environments
Dual-Layer Bayesian Neural Network Fusion Framework (DBNNFF)
- Tackles channel inconsistency errors in phase-difference-of-arrival (PDOA) systems
- Reduces angle errors by 94.7% to just 0.1036° ± 0.0182°
- Outperforms existing algorithms by 25-42.1%
- Even in challenging office and hallway multipath: errors remain <0.17°
🔄 3. Multipath Assistance: Turning Foe into Friend
The most philosophically intriguing approach reframes multipath not as a problem to be eliminated but as a source of additional information. Instead of discarding reflected signals, multipath-assisted localization exploits specular reflections to enhance localizability.
How It Works
- Models likelihoods of both LOS and specular multipath components — “soft multipath information”
- Treats each multipath component as a virtual anchor located at the mirror image of the physical anchor across the reflecting surface
- Enables localization with fewer anchors, maintains accuracy even when LOS paths are blocked
Performance Results
- Cluttered industrial scenarios: 46.4 cm and 33.1 cm 90th percentile errors (3 and 4 anchors)
- Outperforms conventional methods by over 61.8% in challenging conditions
🎛️ Advanced Filtering: The Statistical Battle Against Noise
Beyond raw signal processing, sophisticated filtering techniques play a crucial role in maintaining tracking accuracy over time. The fundamental challenge: TOA measurements in multipath environments exhibit non-Gaussian, impulsive noise characteristics poorly modeled by conventional Gaussian assumptions.
Key Advances
- Alpha-stable distribution modeling: Modified Unscented Kalman Filters (UKF) specifically designed for NLOS and multi-target interference
- Experimental validation: Four DWM1001 UWB sensors tracking two moving targets achieved ~12 cm accuracy
- DS-TWR/DS-TDoA analysis: DS-TWR retains only half the variance previously anticipated; DS-TDoA exhibits roughly five-fold increased variance
- Symmetric response times minimize variance for both protocols
🏭 Real-World Performance: From Theory to Practice
Translating these advances into practical systems requires addressing real-world constraints. The IEEE 802.15.4z standard has enhanced UWB’s capabilities, but achieving consistent centimeter-level accuracy across diverse environments remains challenging.
Adaptive Systems
Adaptive systems that tune localization algorithms based on real-time signal conditions offer a path forward. By selecting appropriate techniques based on Signal-to-Noise Ratio (SNR) and path loss exponent, adaptive positioning systems achieve approximately 10% improvement in moderately NLOS conditions without requiring prior environmental data — setting the stage for truly environment-aware UWB systems.
🚀 Applications and Future Directions
Current Applications
- 🏭 Industry 4.0: Autonomous mobile robots navigating dynamic factory floors with precision
- 📦 Logistics: Real-time asset tracking in warehouses and distribution centers
- 🏥 Healthcare: Patient and equipment tracking within hospitals
- 🥽 Augmented Reality: Spatially aware experiences that understand user position at centimeter scale
- 🚗 Automotive: Passive entry and start systems for smart vehicles
Future Research Directions
- 🧠 Deeper integration of machine learning at the physical layer
- 📡 Joint communication and sensing paradigms — extracting positioning information from routine data exchanges
- 🔧 Self-calibrating systems that adapt to new environments without manual configuration
📌 Conclusion
The multipath challenge that has long constrained UWB indoor positioning is yielding to a multi-pronged assault:
- 🎯 Signal processing advances isolate direct paths with unprecedented reliability
- 🤖 Machine learning — supervised, unsupervised, and self-supervised — learns to correct residual errors without requiring impractical data collection campaigns
- 🔄 Multipath assistance transforms environmental reflections from liabilities into additional positioning references
With modified Kalman filters achieving 12 cm accuracy, neural-aided threshold detection reaching sub-centimeter mean errors, and Bayesian networks cutting angle errors by 95%, the era of reliable centimeter-level indoor tracking has arrived.
The multipath problem hasn’t been eliminated — but it has been solved.
📚 References
- IEEE. (2024). Successive Threshold-Based Multipath Mitigation for UWB Indoor Positioning. IEEE Transactions on Communications.
- Ghent University & Siemens. (2024). Unsupervised Deep Learning for UWB TDoA Localization in Multipath Environments. IEEE International Conference.
- Nature Scientific Reports. (2025). Dual-Layer Bayesian Neural Network for UWB Angle-of-Arrival Estimation.
- arXiv. (2024). Self-Supervised Deep Reinforcement Learning for UWB Error Correction.
- IEEE. (2024). Multipath-Assisted UWB Localization: Turning Reflections into Virtual Anchors.
- ACM. (2024). Alpha-Stable Distribution Modeling for UWB Kalman Filtering in NLOS Conditions.